| ตะกร้า |
| บ้าน | ผลิตภัณฑ์ | teensy | บล็อก | ฟอรั่ม |
| You are here: teensy |
ไลบรารี AccelStepperไลบรารี AccelStepper ช่วยให้คุณสามารถเชื่อมต่อมอเตอร์ stepper หลาย ๆ แบบด้วยการเร่งความเร็วและการชะลอการควบคุม
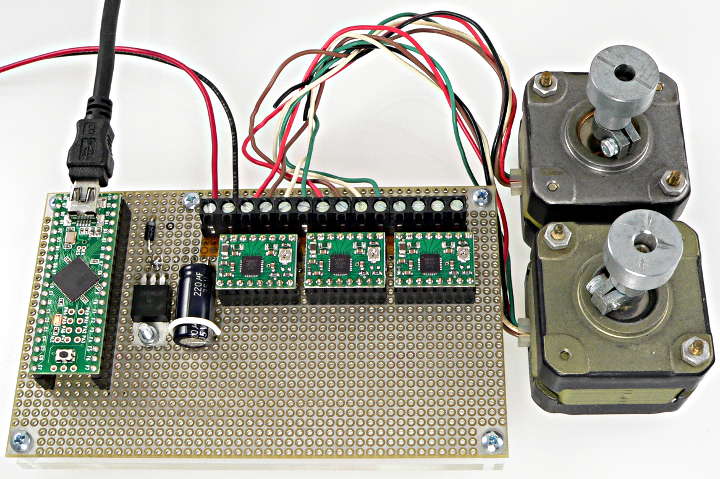
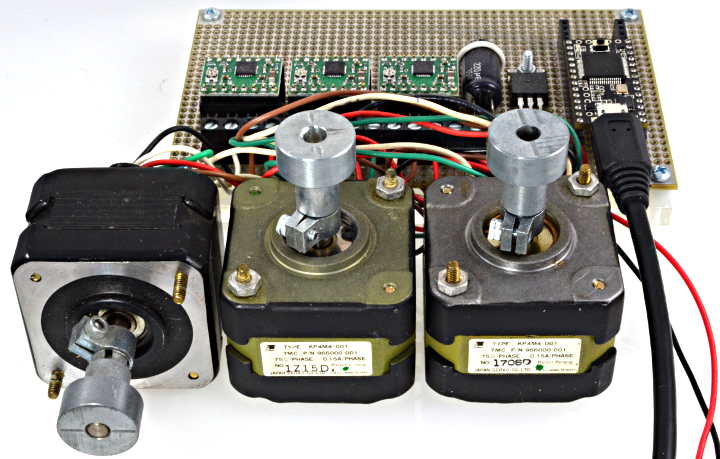
ความต้องการฮาร์ดแวร์AccelStepper เข้ากันได้กับบอร์ด Teensy ทั้งหมดสามารถส่งสัญญาณออกเพื่อควบคุมทรานซิสเตอร์หรือสัญญาณ Step & Direction เพื่อ stepper motor drivers boards
การใช้งานพื้นฐานคุณสามารถสร้างวัตถุ AccelStepper หลายรายการโดยให้ชื่อเฉพาะสำหรับแต่ละมอเตอร์AccelStepper สามารถจัดการมอเตอร์ได้หลายแบบตราบเท่าที่คุณเรียกฟังก์ชัน "เรียกใช้" ซ้ำ ๆกำหนดและกำหนดค่ามอเตอร์AccelStepper mystepper (1, pinStep, pinDirection);
มอเตอร์สตาร์ทมอเตอร์ควบคุมโดยคณะกรรมการควบคุมเฉพาะ
AccelStepper mystepper (2, pinA, pinB);
มอเตอร์ขั้วสองขั้วที่ควบคุมโดยวงจร H-Bridge
AccelStepper mystepper (4, pinA1, pinA2, pinB1, pinB2);
มอเตอร์แบบ unipolar stepping ซึ่งควบคุมโดยทรานซิสเตอร์ 4 ตัว
mystepper setMaxSpeed (stepsPerSecond);
ตั้งค่าความเร็วสูงสุด ค่าเริ่มต้นช้ามากดังนั้นต้องกำหนดค่าเมื่อควบคุมโดยการตั้งค่าตำแหน่ง stepper จะเร่งเพื่อเลื่อนไปที่ความเร็วสูงสุดนี้และชะลอตัวลงเมื่อถึงปลายทาง
mystepper setAcceleration(stepsPerSecondSquared);
ตั้งค่าการเร่งความเร็วให้ใช้ในขั้นตอนต่อวินาทีต่อวินาที
การควบคุมตำแหน่งmystepper moveTo (targetPosition);
เลื่อนมอเตอร์ไปยังตำแหน่งสัมบูรณ์ใหม่ นี้ส่งกลับทันที การเคลื่อนไหวจริงมีสาเหตุมาจากการเรียกใช้ฟังก์ชัน ()
mystepper ย้าย (ระยะทาง);
ย้ายมอเตอร์ (ทั้งบวกหรือลบ) เมื่อเทียบกับตำแหน่งปัจจุบันนี้ส่งกลับทันที การเคลื่อนไหวจริงมีสาเหตุมาจากการเรียกใช้ฟังก์ชัน ()
mystepper currentPosition ();
อ่านตำแหน่งการอภัยโทษในปัจจุบันของมอเตอร์
mystepper distanceToGo ();
อ่านระยะทางมอเตอร์จากตำแหน่งปลายทาง นี้สามารถใช้เพื่อตรวจสอบว่ามอเตอร์ได้ถึงตำแหน่งสุดท้าย
mystepper run ();
อัพเดตมอเตอร์ นี้จะต้องเรียกว่า repetitively เพื่อให้มอเตอร์ย้าย
mystepper runToPosition ();
อัพเดตมอเตอร์และรอให้ถึงจุดหมายปลายทาง ฟังก์ชั่นนี้จะไม่กลับมาจนกว่ามอเตอร์จะหยุดทำงานดังนั้นจึงเป็นประโยชน์เฉพาะในกรณีที่ไม่มีมอเตอร์อื่น ๆ เคลื่อนที่
การควบคุมโดยใช้ความเร็วmystepper setSpeed (stepsPerSecond);
ตั้งความเร็วในขั้นตอนต่อวินาที ฟังก์ชันนี้จะส่งกลับทันทีการเคลื่อนไหวจริงมีสาเหตุมาจาก runSpeed ()
mystepper runSpeed ();
อัพเดตมอเตอร์ นี้จะต้องเรียกว่า repetitively เพื่อให้มอเตอร์ย้าย
ตัวอย่างโปรแกรม#include < AccelStepper .h> // AccelStepper Xaxis (1, 2, 5); // ขา 2 = ขั้นตอน, ขา 5 = ทิศทาง / / Yaxis AccelStepper (1, 3, 6); // พิน 3 = ขั้นตอน, ขา 6 = ทิศทาง // AccelStepper Zaxis (1, 4, 7); // พิน 4 = ขั้นตอนหมุด 7 = ทิศทาง AccelStepper Xaxis (1, 3, 6); // ขา 3 = ขั้นตอน, ขา 6 = ทิศทาง Yaxis AccelStepper (1, 4, 7); // ขา 4 = ขั้นตอนขา 7 = ทิศทาง Zaxis AccelStepper (1, 5, 9); // ขา 5 = ขั้นตอน, ขา 8 = ทิศทาง การตั้งค่าเป็นโมฆะ () { Xaxis setMaxSpeed (400); Yaxis setMaxSpeed (400); Zaxis setMaxSpeed (400); Xaxis setSpeed (45); Yaxis setSpeed (25); Zaxis setSpeed (80); } void loop () { Xaxis runSpeed (); Yaxis runSpeed (); Zaxis runSpeed (); }
รายละเอียดเพิ่มเติมโปรดดูเอกสารประกอบของไลบรารี AccelStepper อย่างเป็นทางการ สำหรับรายละเอียดเพิ่มเติม |
ไม่มีความคิดเห็น:
แสดงความคิดเห็น